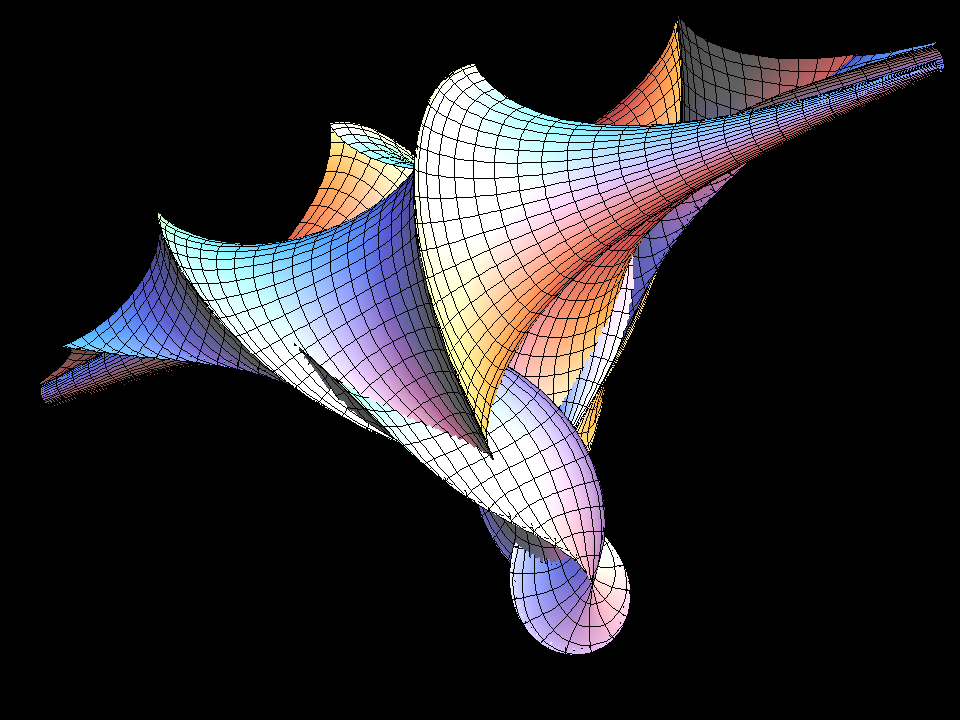
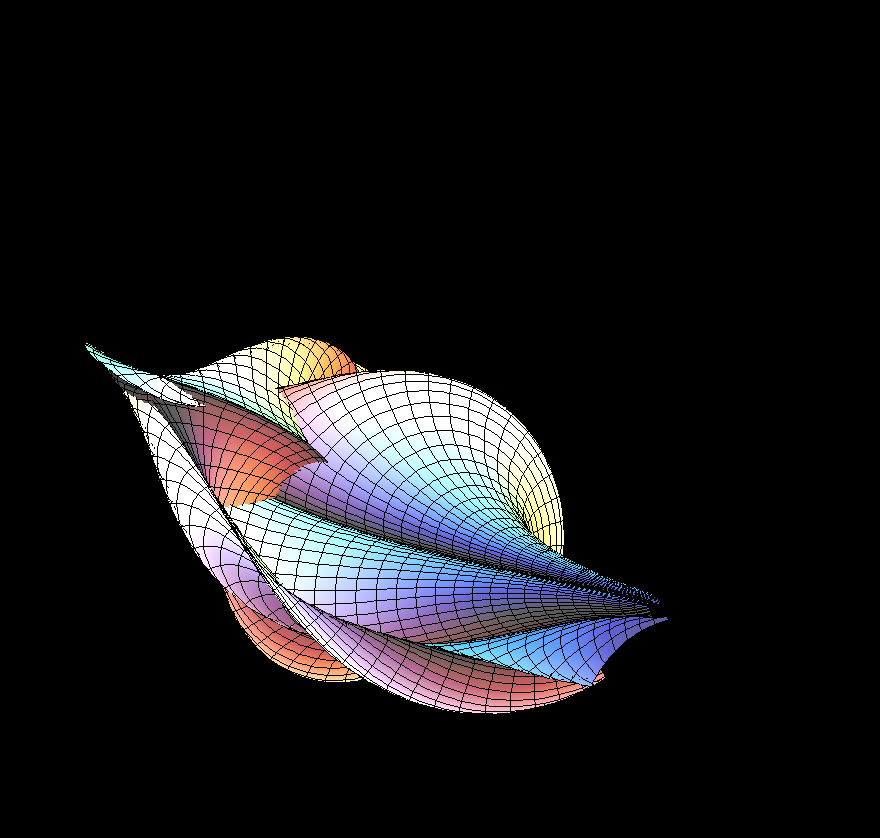
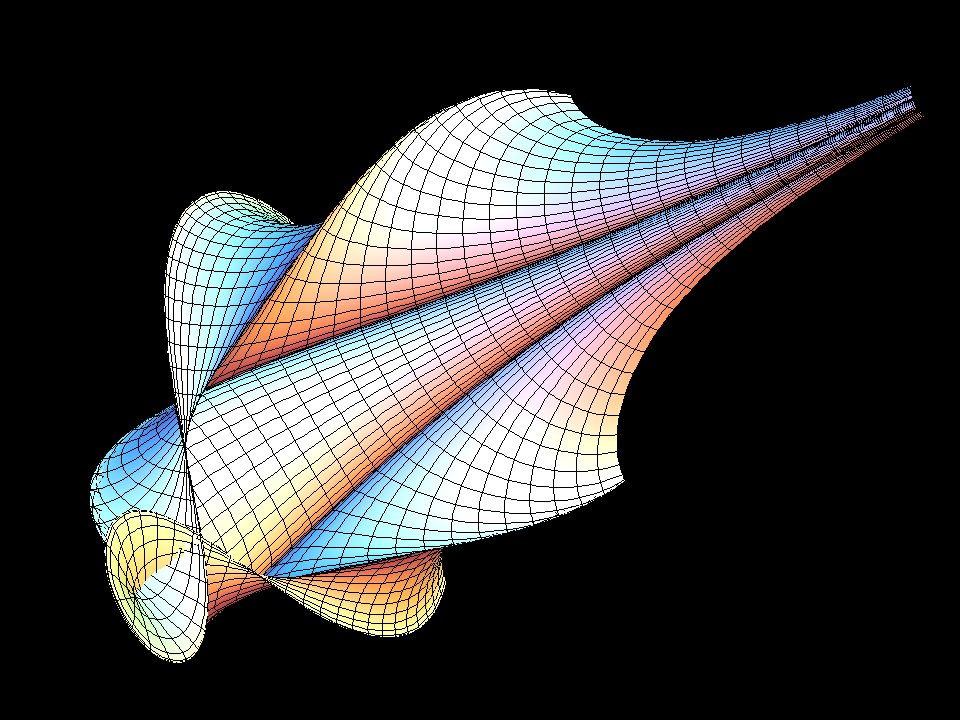
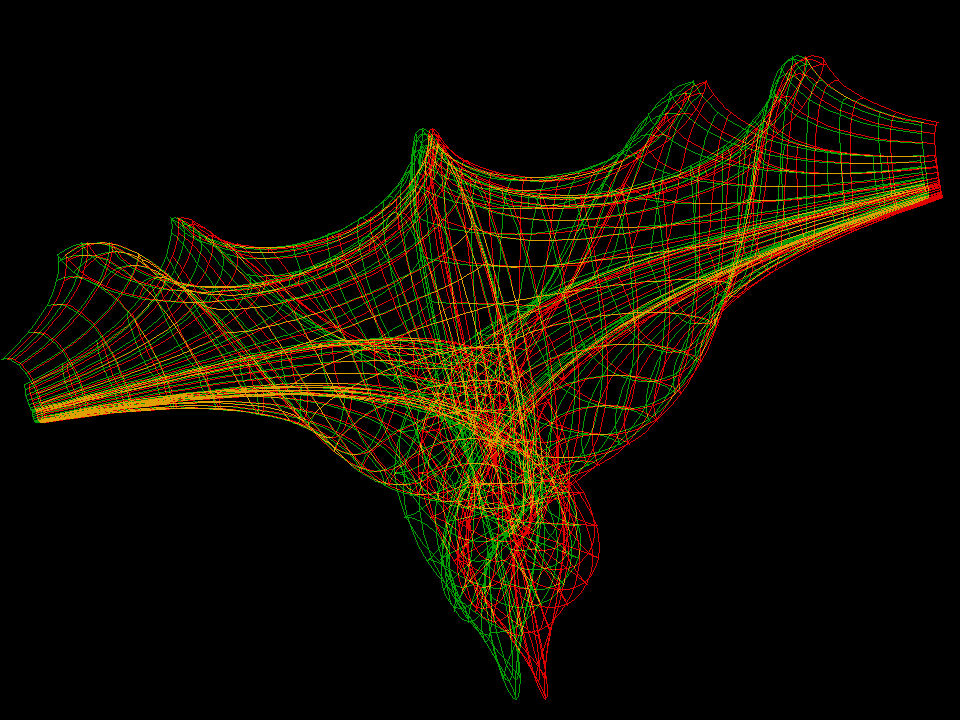
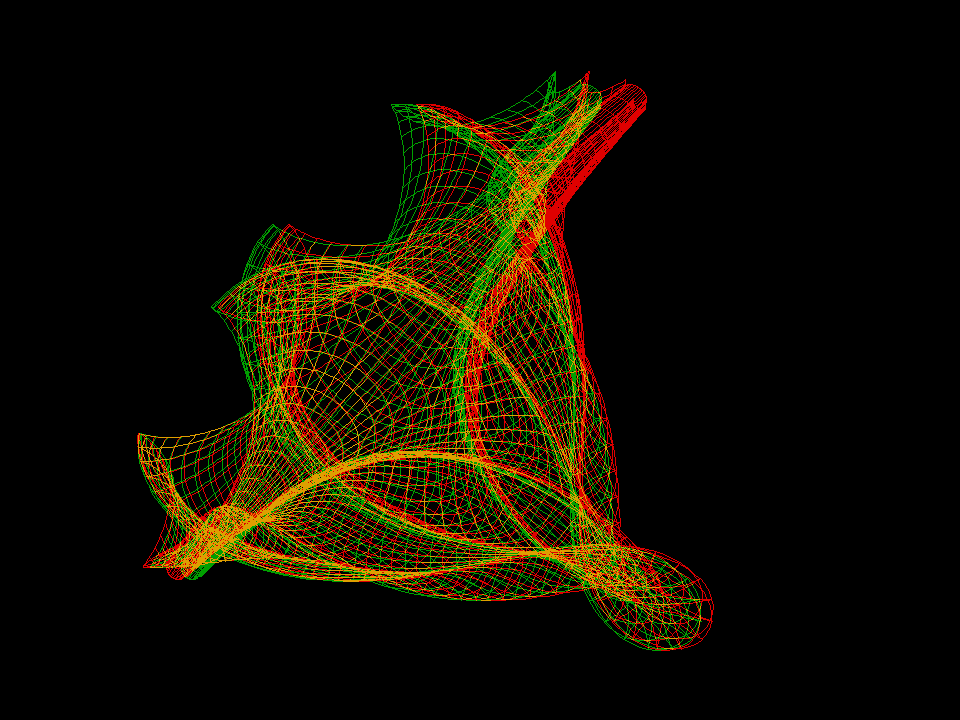
Three-Soliton Surface means: a surface family of Gauss curvature K = -1 which
depends on three constants a, b, c; the word “soliton” refers to solutions
of the Sine-Gordon Equation from which the surfaces are constructed; these
solitons q(a,b,c; u,v) also depend on a, b, c; as functions of (u,v) they are
defined and without singularities for all (u,v) in R^2.
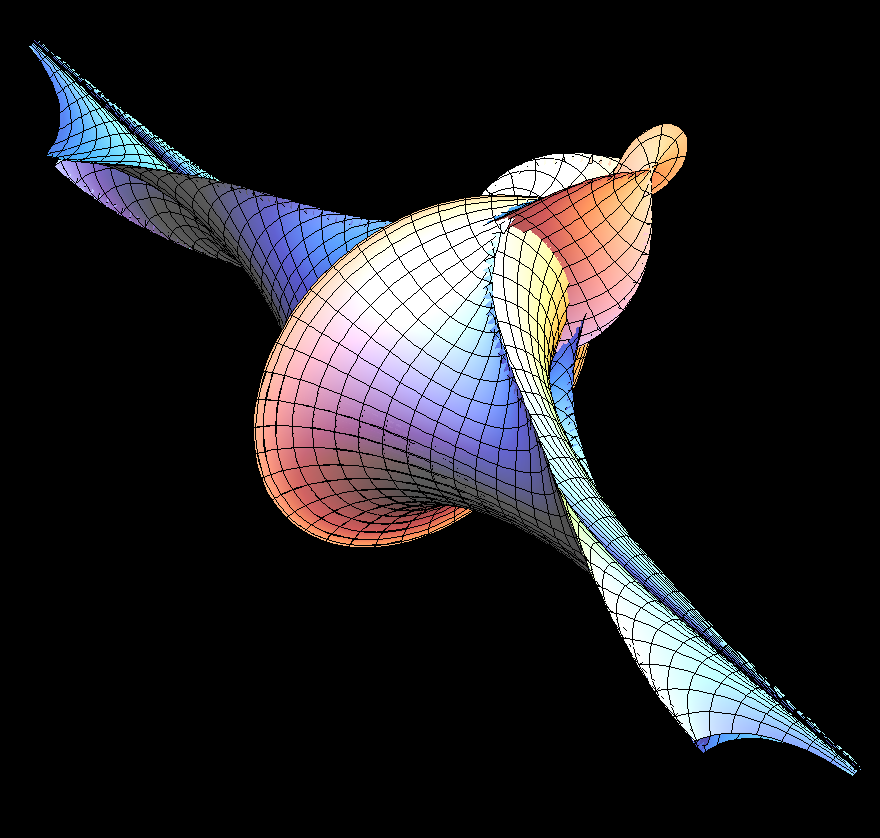
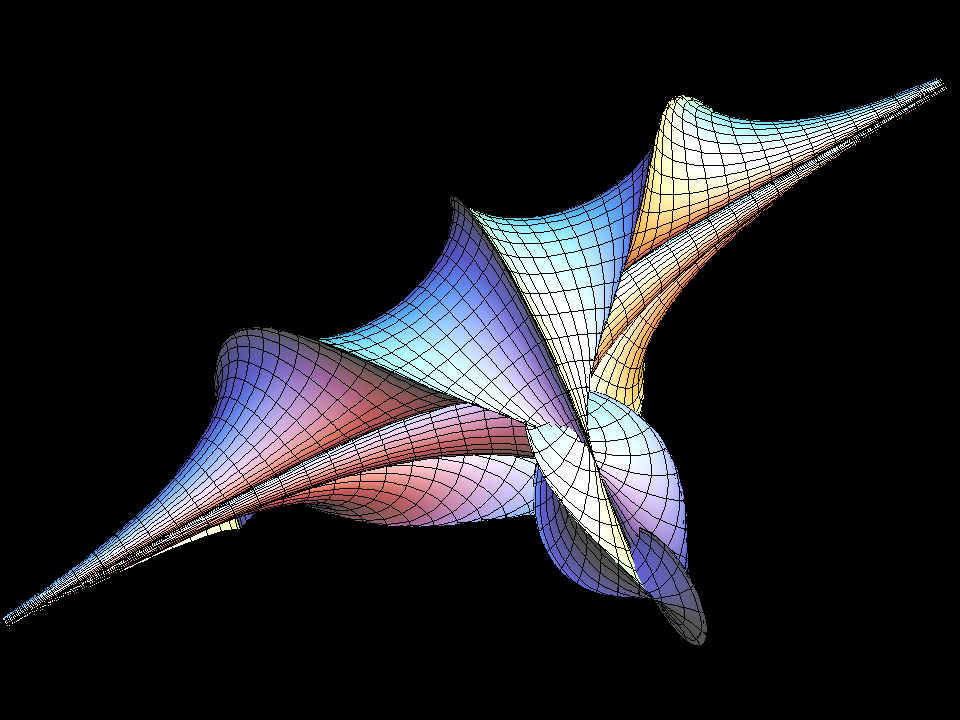
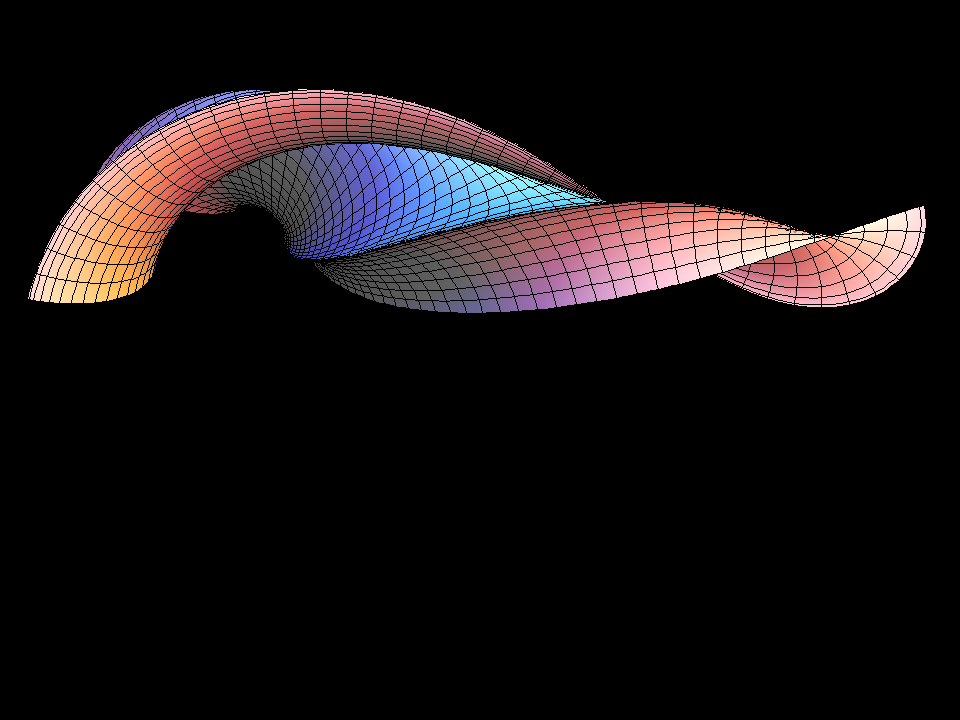
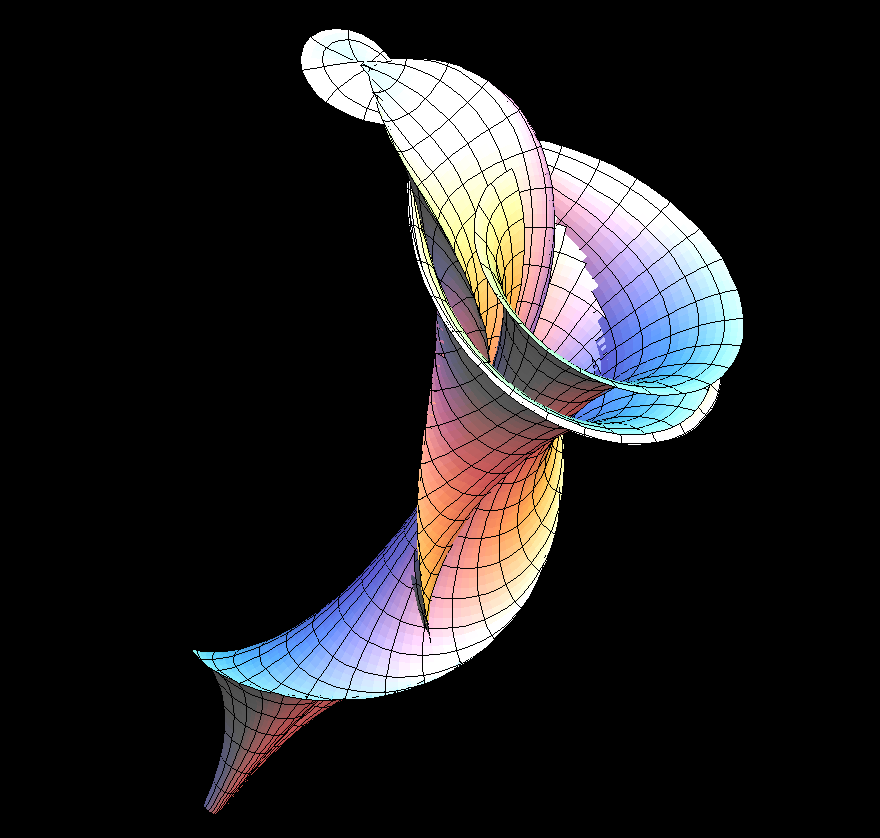
Negative curvature can be seen in images: No tangent plane leaves the surface
locally on one side but each tangent plane intersects the surface. The intersection
curve has a double point where the tangent plane touches and the angle between
the two tangents at the double point is q(a,b,c; u,v). The sharp rims of the
surfaces occur where sin(q) = 0.
All 3-soliton surfaces have many selfintersections; to get interpretable images the (u,v)-range is restricted to a small rectangle (contained in |u|,|v| ≤ 10).
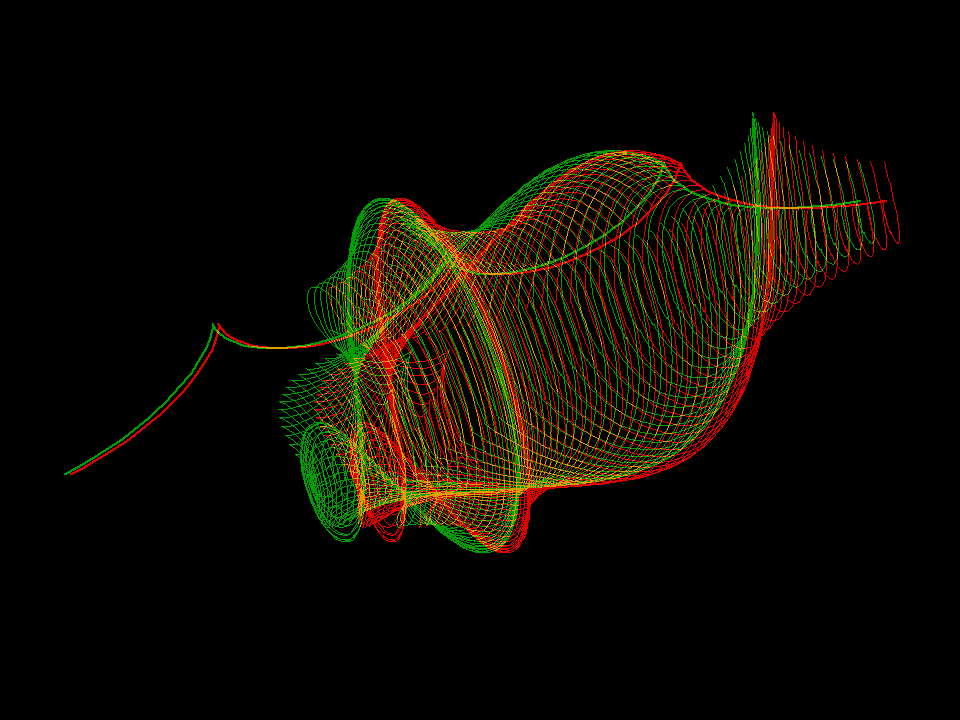
Let us add that the pseudospherical surfaces bring together two beautiful mathematical constructions. On the one hand, a modern interpretation of a theorem of Bianchi allows to explicitly find a sequence of more and more complicated soliton solutions q(a,b, …; u,v) of the Sine-Gordon equation (Terng-Uhlenbeck). On the other hand, given such a solution, one can explicitly write down so called “first and second fundamental forms” to define a surface with K = -1. Before one has the parametrized surface (u,v) ⟶ F(u,v) in R^3, the first fundamental form allows to compute for a curve (u(t),v(t)) in the domain the length which the corresponding curve F(u(t),v(t)) on the surface would have. Similarly, the second fundamental form then gives all the curvature information for the curve on the surface, BEFORE one actually has the surface! length- and curvature-information for a space curve allow to write an ODE which then determines a space curve with these length- and curvature-data. These ODEs are solved for the first anaglyph picture above. Finally, if for each fixed v the would be surface curves u ⟶ F(u,v) have been computed, then one has without further computation the transversal curves v ⟶ F(u,v). Do they also satisfy their own ODEs? YES, because the function q (which we used to make first and second fundamental forms) is a solution of the Sine-Gordon equation! (In differential geometry one has, more generally, for this final compatibility the Gauss- and Codazzi equations, but our first and second fundamental forms are so special that the Gauss- and Codazzi equations reduce to the Sine-Gordon equation.)