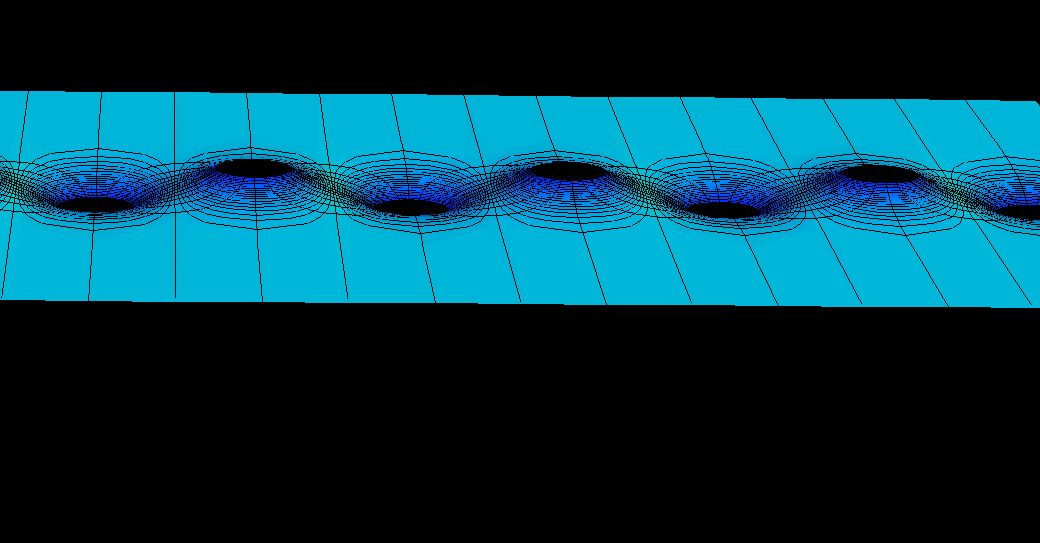
Out of the plane (blue) we have an infinite sequence of half-
Catenoids growing,
alternatingly up and down. Compare with the surface
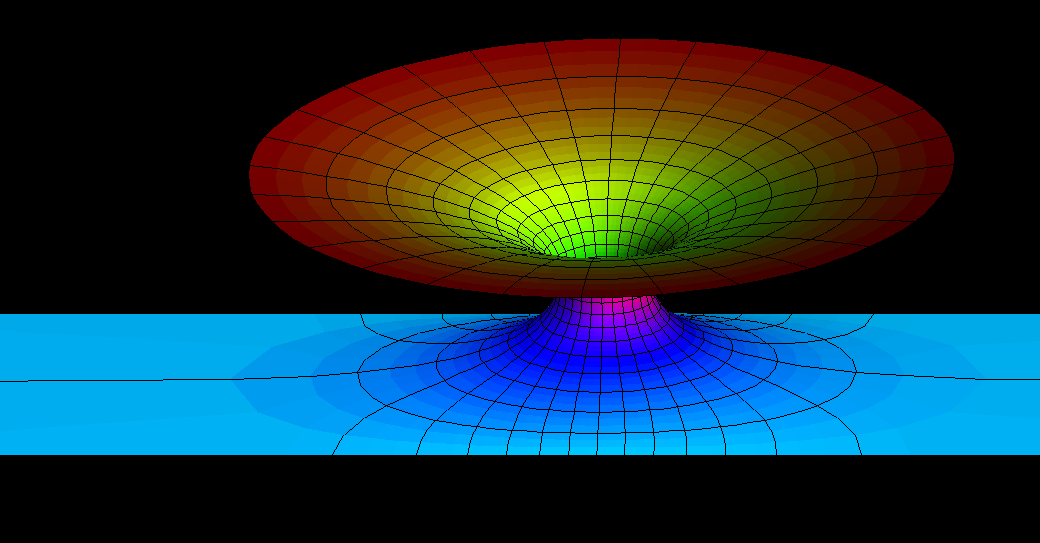
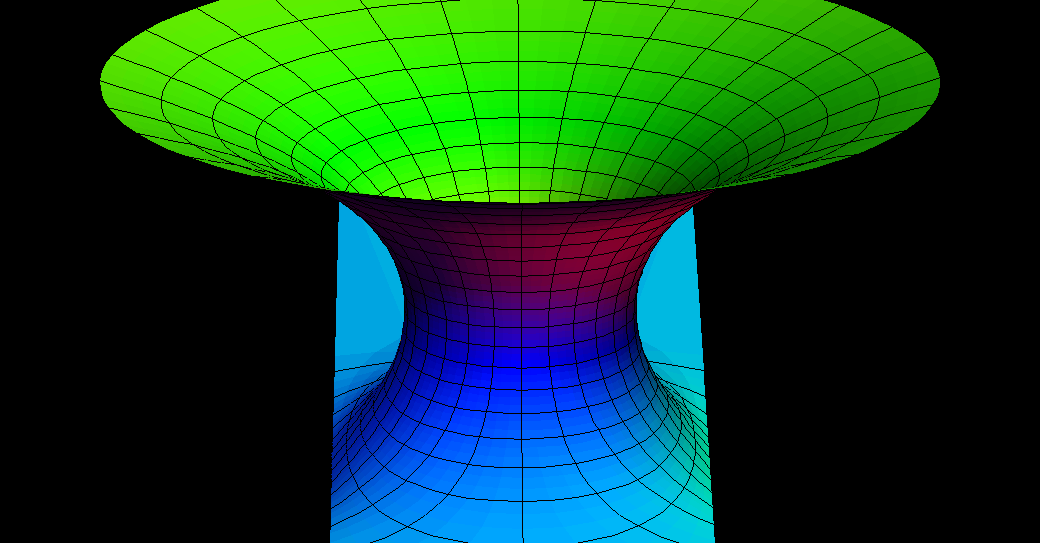
Lopez-Ros No-Go
it has two
half-catenoids growing out of a plane and the Lopez-Ros theorem says, that one cannot
make the limiting normals of the two half-catenoids parallel to the normal of the
plane. They stay tilted towards each other. An infinite sequence of half-catenoids
keep each other from tilting.
The up-catenoids and the down-catenoids have their limiting normals opposite to
the limiting normal of the blue plane. The gauss map of this surface is g(z) = c*sin(z).
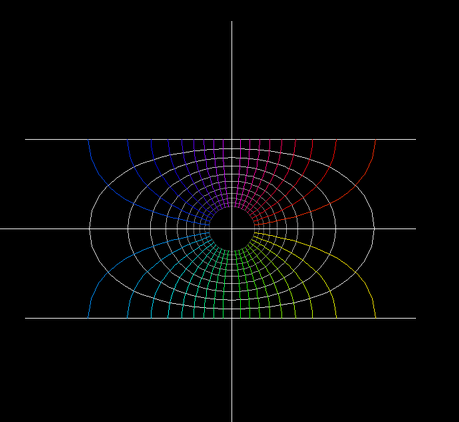
This polar grid in a strip is used to compute the Weierstrass representation of this surface.
The grid was made with the help of the complex logarithm.
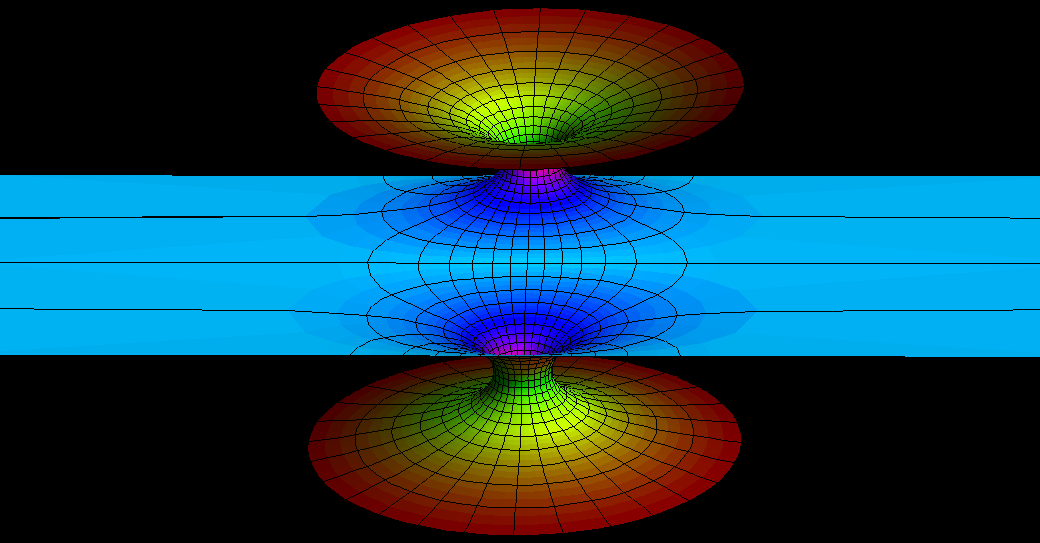
The straight lines on the surface are symmetry lines for 180 degree rotation. It therefore suffices to compute one half-catenoid until the symmetry lines on both sides are reached.
A 180 degree rotation around a boundary line of the initial piece was used to obtain this
2-half-catenoid piece. Further extensions can now be made by translating one boundary
line to the other, by the so called 'period translation'.
Mathematicians often ignore translation symmetries, they 'identify' boundary points by
the period translation. This identifies the current surface to an abstract cylinder with
just two half-catenoids. Conformally a cylinder is a twice punctured sphere.
This animation shows, how the parameter c of the gauss map g(z) = c*sin(z) changes the
geometry of the surface. The surface normal n(p) at the point p where the symmetry curve
from one half-catenoid to the next crosses the straight symmetry line is determined by c.
The surfaces in this animation are scaled so that the distance between the bounding
straight symmetry lines is always the same. A large number c makes the half-catenoids
skinny a small number makes them fat. In this animation 2 < c < 6.