The Henneberg surface was the first known non-orientable minimal surface, first discovered by 1875, by Lebrecht Henneberg.
Until the 1981 it was the only known non-orientable minimal surface.
The Henneberg surface is topologically equivalent to the
Cross-Cap Surface, thus is a representation of projective plane.
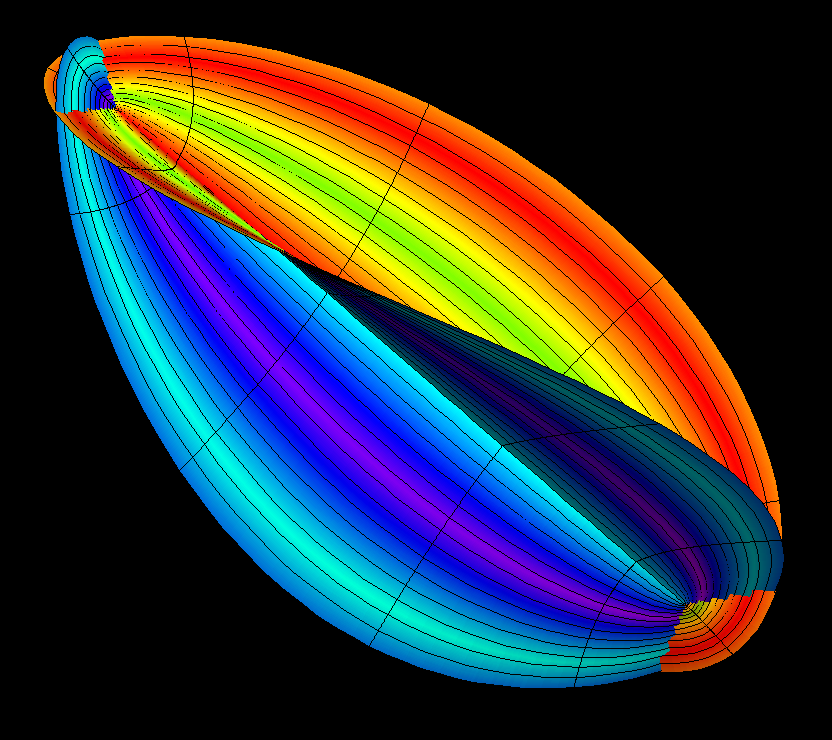
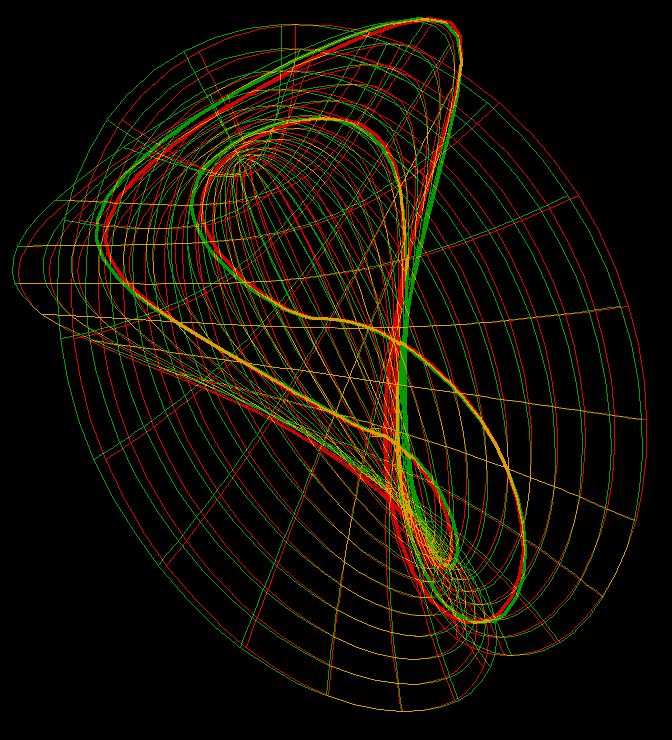
The Henneberg surface, rotating.
The Henneberg surface was often studied due to its branch points (i.e. derivative
of the parametrization is zero). Branch points make visualizations of the surface
difficult.
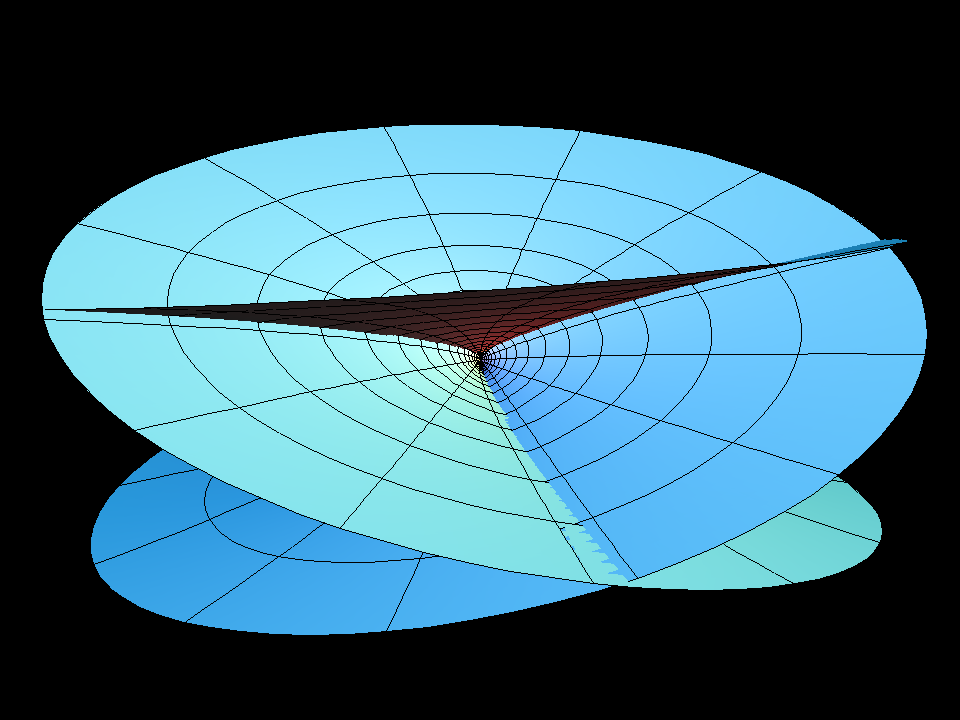
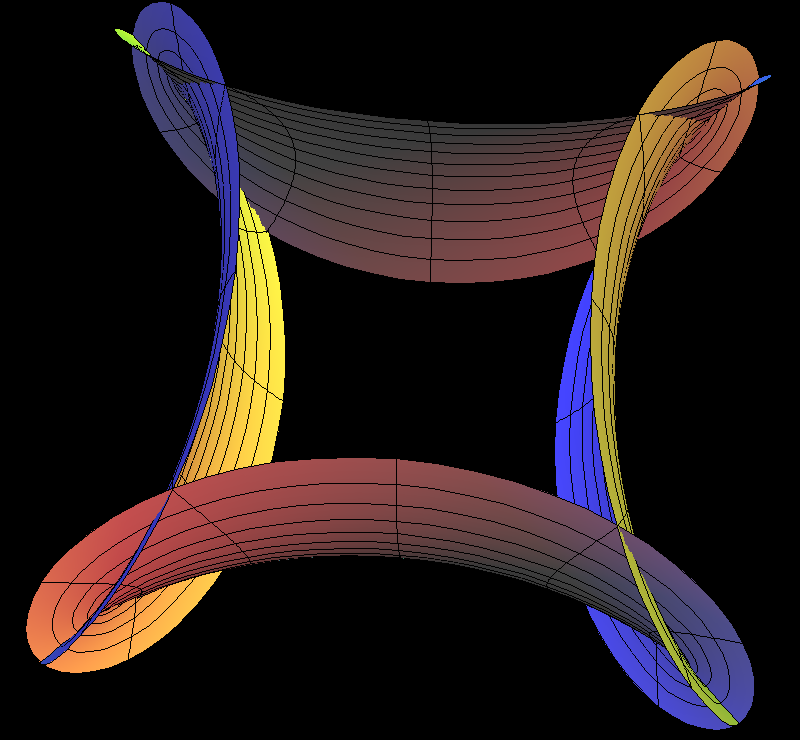
The henneberg surface, cut across the selfintersection segment, shows,
how the surface behaves near the selfintersection segment. The angle of
selfintersection is 90 degrees in the middle and decreases to zero towards
the endpoints of this segment, i.e. towards the branch points. One can also
see that, without this segment, the surface has two sides, colored in blue
and orange. But along the selfintersection segment the blue side and the
orange side meet: the henneberg surface is onesided or non-orientable.
Note that the points (u,v) and (-u, v + π) in the parameter domain have
the same image point on the surface. The points (0,v), 0 ≤ v ≤ 2 π,
are mapped 2-1 onto the selfintersection segment.
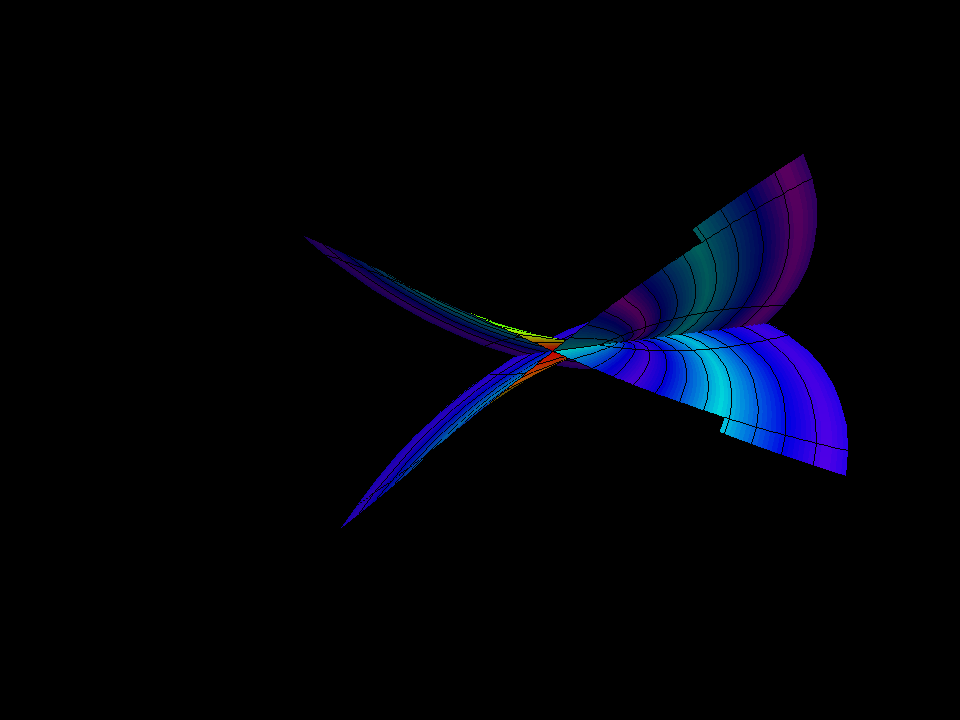
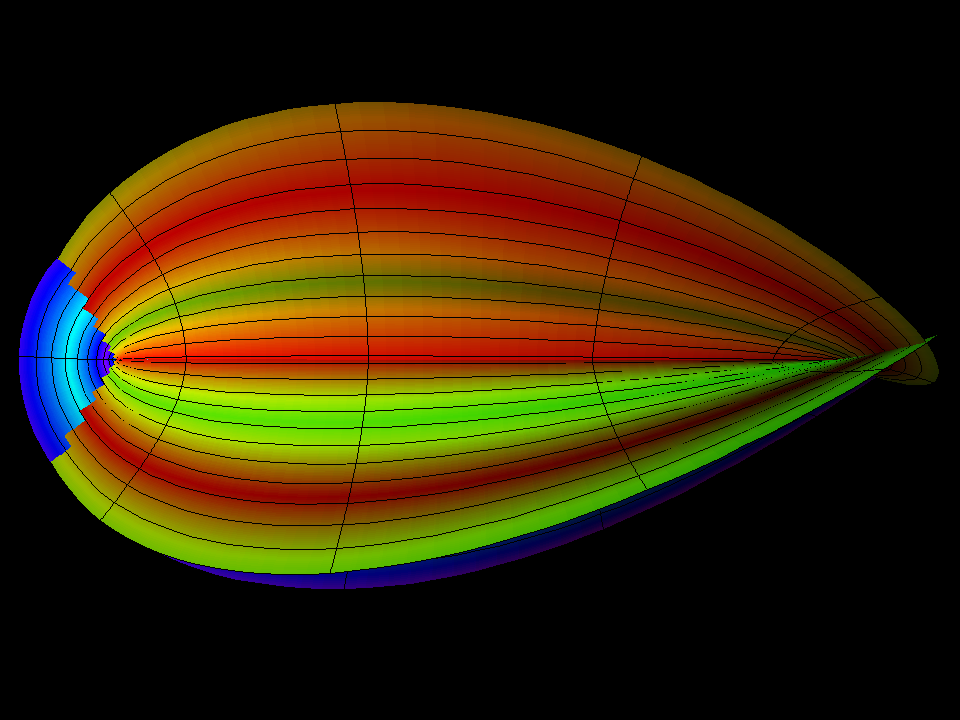
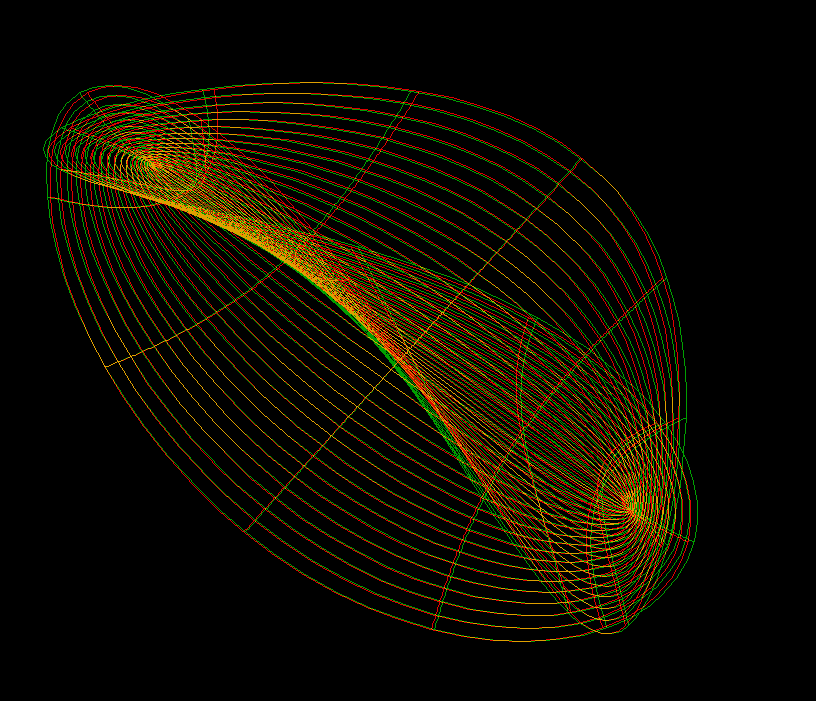
Far away view of the Henneberg surface.
When looked far-away, it looks like
Enneper Surface.
View the surface as an image of the (Riemann) sphere,
then: antipodal points have the same image so that any halfsphere is mapped to
the full Henneberg surface. The equator is mapped to the self-intersection
segment between the two branch points. The animation ends with cut-away views to
see the self-intersection better.
The Henneberg surface as image of the half sphere without the equator is two-sided:
we can color one side blue, the other orange. Along the self-intersection segment
the blue side connects up with the orange side so that the complete Enneper
surface is only one-sided. The Henneberg surface is an image of the projective
plane, so it is topologically the same as
Cross-Cap Surface
.
The conjugate of the Henneberg surface is twice as large, because the Henneberg
surface maps opposite points of the (Riemann) sphere to the same point in R^3
and the conjugate surface does not do that.
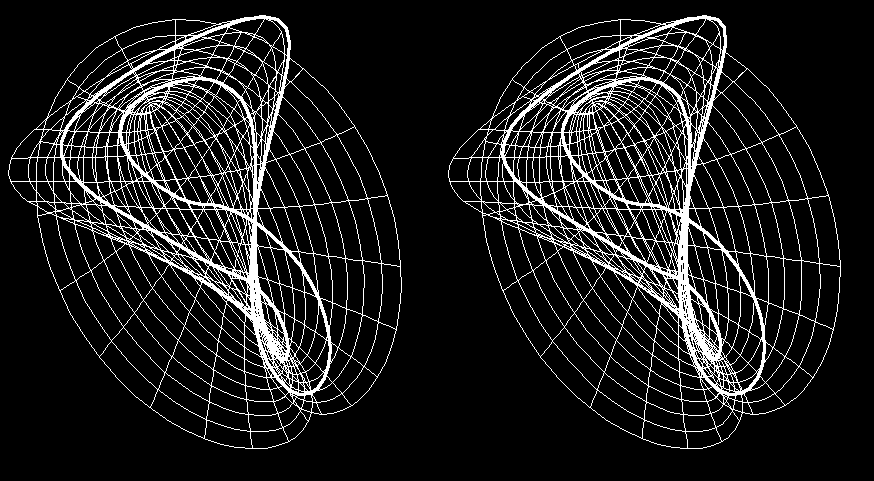
The Moebius band on the surface demonstrates that the surface is not orientable
(it has only one side).
Henneberg in wireframe, rotating.
Henneberg moebius cross-eyed stereogram.